Introduction
IntroductionIt is a project of a mobile platform capable of moving in any direction thanks to its drive wheels – spheres. It will be an innovative vehicle whose mobility exceeds the possibilities of classic solutions based on wheels or tracks. The ball-based system allows for full movement control — driving sideways, diagonally, and rotating in place — without the need to change the orientation of the entire vehicle. The platform will be equipped with an integrated control system and will serve as a technological demonstrator and a base for further educational and research applications.
Project goals and objectives
The main assumption of the venture is to design and manufacture a fully functional vehicle prototype with high maneuverability,which uses spherical wheels to achieve full omnidirectionality. The project aims to enable precise maneuvering and real-time control by the user, which will allow the platform to be used for educational and demonstration purposes at fairs or conferences. Through the implementation of this task, team members will develop knowledge in the design and integration of advanced mobile systems, simultaneously creating a base for future autonomous projects, such as inspection robots or artificial intelligence demonstrators.
Modules implementation and work execution
The project is being coducted as an integrated mechatronic systemwith work divided into several key technical stages.
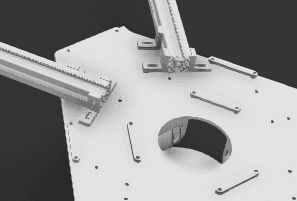
- Mechanical design in a CAD environment: models of the ball wheels and the support frame will be developed.
- Selection and installation of motors, drive rollers, and motion transmission systems.
- Designing a motion control system based on a microcontroller, drivers, and a stable power supply from lithium-ion batteries.
- Software featuring omnidirectional control algorithms that utilize encoders.
- An intuitive user interface in the form of an app or a Bluetooth controller.
- Real-world functional tests designed to verify the smoothness of the ride and the speed of response to commands.