Mission objective and functions of the mini-satellite
As the main objective of the CanSat mission, the project team chose to test and measure conditions on foreign planets, due to their interest in astronomy and space exploration with a view to expanding human reach to other planets and establishing research centers on them.
This includes making sure that a given planet is safe to land on—the hoal is to measure elements of its living conditions, such as temperature, pressure, electromagnetic field, and humidity. To ensure that not only the equipment is safe, but also people, more detailed parameters such as gamma radiation, UV radiation, and light intensity will be measured, the latter mainly to predict the efficiency of solar panels. In addition, what is needed is to confirm that the CanSat survives a fall from the height specified in the challenge, for which an accelerometer, GPS, and gyroscope will be installed.
All collected data on the measured parameters should be stored on an external memory device, in this case a microSD card, and transmitted in real time during the descent to the ground station via radio transmission.
Mini-probe design
Overview
The probe will be dropped from a rocket launched to an altitude of approximately 2,000 meters, and its descent speed will not exceed 8 meters per second. During descent and after landing, our probe will continuously measure all the parameters listed above.
Mechanical design
All modules and systems that will comprise the probe are:
- Sensor Module: such as a thermometer (DHT11), hygrometer (DHT11), barometer (IMU 10DoF), magnetometer (IMU 10DoF), GPS (MTK3339), Geiger counter (GC-1602-NANO), and spectrophotometer (AS7265x). To determine whether the alien planet is a safe area for colonization, gamma radiation, UV radiation, and electromagnetic fields will be measured. In addition, light intensity will be checked to indicate whether the solar panels of the future colony will be effective. Any other measurements from the secondary mission will be used to determine the current position and status of the probe, in accordance with the planned course of the mission.
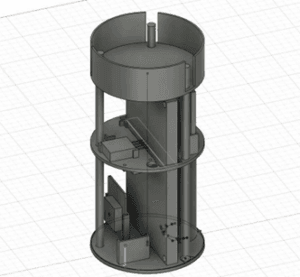
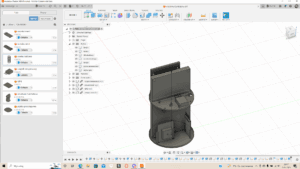
- Case: 3D printed using PETG filament, weighing just over 300 g. The opening part of the casing will probably be located at the bottom of the CanSat to provide easy access to the battery and equipment. To make the spectrophotometer work, a round hole on one side of the satellite's housing will be made. LED indicator lights and an on/off switch will be installed on its outer surface. Most of the satellite's modules will be mounted vertically, with the heaviest components, such as the battery, at the bottom of the housing.
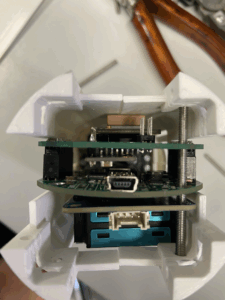
- The Main Controller: Arduino Nano RP2040 acts as the main controller and motherboard of our satellite. It contains a Raspberry Pi RP2040 microcontroller. Each module used in the primary and secondary missions will be connected to it, and the controller will be responsible for data transmission between the mini-satellite and the ground station, also via a radio module.
- Data saving Module:: The microSD card reader will be installed on the outer surface of the housing.
- Communication system (Radio Module): unidirectional (only from CanSat to ground station), with a radio frequency of 433 MHz. The LoRa-02 module will be used as a transceiver, with a standard 33×4.9 mm copper antenna in the satellite and a COMA ATK-10 antenna connected to the ground station.
- Power supply Module: Power will be supplied by a lithium-ion battery with a capacity of 3350 mAh. According to energy consumption readings during the operation of each module, the CanSat satellite should operate for approximately 7.5 hours, with an average consumption of approximately 10 hours.
- Recovery system with GPS module: The parachute is the main part of the CanSat recovery system. Its main purpose is to slow down the CanSat's descent to 8 m/s. The parachute will be dome-shaped and made of nylon, using bright red materials, in order to later locate the CanSat probe at its landing site on the ground. The location process requires GPS, whose signal will be sent continuously until the satellite is found and turned off.
Software design
The task of the mini-probe software will be to calculate the relevant values using measurement data obtained from the main and auxiliary mission modules and send them to the ground station. It should manage the communication system so that the most important information, such as location and speed, is sent as a priority. The second important function of the satellite control program will be to save the measured data directly to an external disk during the measurement process. Most of the collected data will be sent to the ground station in real time, but to ensure that nothing is lost, a copy of each measurement result will be stored.
The described software will be written in Arduino C, using Arduino IDE.
Ground control station
The ground station will consist of a single computer connected to a radio management module, which will capture data received from the mini-satellite. The ground station software will display each measurement result received in the application in the form of corresponding graphs. The CanSat 3D model will show all information about the satellite's position and status. The data will be displayed in the same way in a publicly available mobile application. The data used by the mobile application will be provided via an Internet FTP server by the ground station computer. The ground station software will be written mainly in the C# programming language, with the exception of the radio management module written in Arduino C.
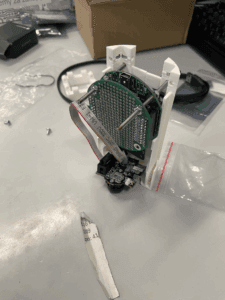
Gallery: design and renders