Wprowadzenie
Sterowiec stanowi projekt budowy autonomicznego pojazdu unoszonego gazem lotnym, wraz z dedykowanym systemem stacji kontroli lotów i stacją dokowania. Jest to również największy dotychczas projekt, którego realizacji podjęło się SKN SpaceCoffee.
Ideą stojącą za projektem jest rozwój transportu powietrznego z wykorzystaniem pojazdu lżejszego niż powietrze. Od czasu zaprzestania wykorzystania sterowców, zapotrzebowanie na zrównoważone, alternatywne rozwiązania transportowe w XXI wieku ponownie ożywiło temat badań nad takimi systemami latającymi. Zaprojektowany i skonstrowany przez nas sterowiec ma mieć stosunkowo niewielkie wymiary, jego ładowność ma sięgać 5 kg, a jego głównym celem ma być transport ładunków na krótkie odległości. Sukces projektu ukazuje możliwość dalszego rozwoju i szerszego wykorzystania takich sterowców jako alternatywy dla dronów transportowych i innych urządzeń, których ładowność jest ograniczona, a czas działania skrócony. Dużą zaletę stanowi ich długi czas wznoszenia się, niskie zużycie energii oraz niewielkie wymagania infrastrukturalne, a także skuteczne działanie w sprzyjających warunkach przy słabym wietrze.
Projekt konstrukcyjny
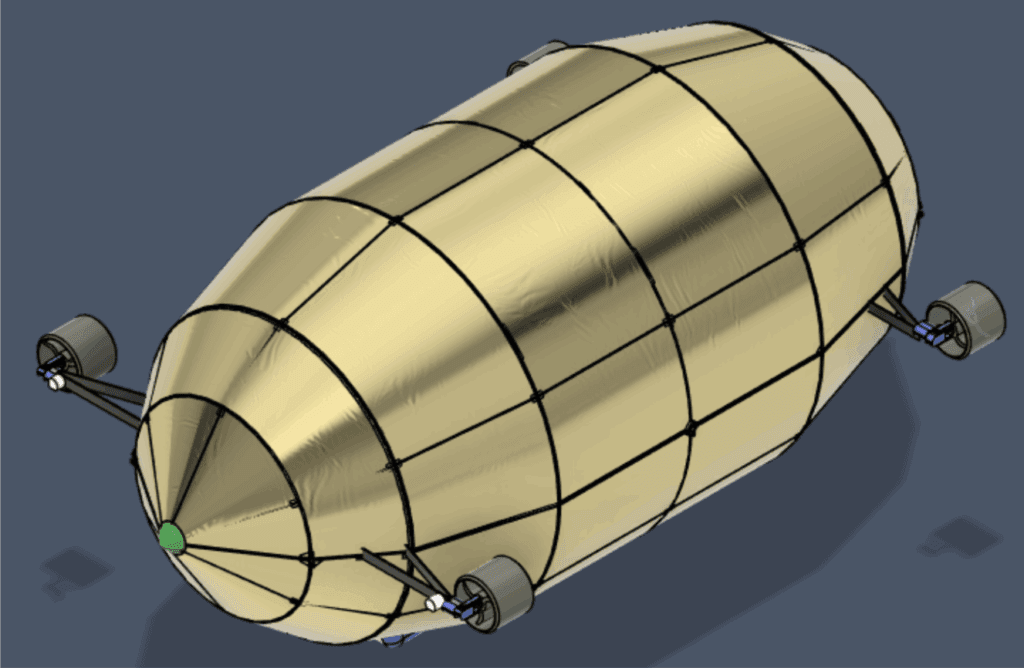
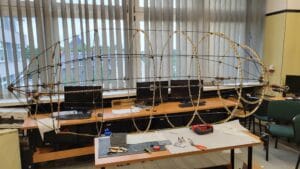
Konstrukcja statku powietrznego ma maksymalizować wydajność nośną przy jednoczesnym zapewnieniu trwałości, modułowości i niskiej masy całkowitej. Rama podtrzymująca układ napędowy, elementy elektroniczne i mechanizm mocowania ładunku została zbudowana z wytrzymałych prętów węglowych, elementów drewnianych i części drukowanych w 3D, takich jak elementy mocujące. Pozwala to na precyzyjne regulacje podczas fazy testowej. Dzięki temu również, prototypowanie staje się przystępne cenowo. Kosz gondoli pod poszyciem zawiera główną jednostkę obliczeniową (Raspberry Pi 5), baterie i główne czujniki. Jego projekt umożliwia szybki dostęp do komponentów. Sterowiec będzie unosił się w powietrzu dzięki balonom stratosferycznym wypełnionym gazem nośnym, które zamontowane są na ramie pod poszyciem. Poszycie ma na celu zmniejszenie ryzyka wynikającego z gromadzenia się elektryczności statycznej na zewnętrznych powierzchniach sterowca. Podczas testów gazem nośnym będzie wodór, jednak podczas publicznych prezentacji konieczne będzie użycie stabilnego helu.
Aby zakończyć budowę, konieczne było określenie rozkładu ciężaru i stabilizacji środka ciężkości, ponieważ oba te czynniki mają kluczowe znaczenie dla osiągnięcia stabilności lotu i zapewnienia responsywnej autonomicznej nawigacji. Aby uwzględnić rozszerzanie się i kurczenie gazu w sterowcu podczas lotu, w projekcie zastosowano również elastyczny system mocowania między poszyciem a sztywnym korpusem.
System napędowy
Układ napędowy docelowo ma być zintegrowany z systemem autonomii. Każdy zespół silnika składa się z dwóch serwomotorów połączonych lekkimi wspornikami wydrukowanymi w technologii 3D, na końcu których umieszczony jest silnik elektryczny.
Wsporniki są połączone ze sobą w sposób umożliwiający niezależny obrót silnika w dwóch osiach, co zapewnia operatorowi wysoki stopień manewrowości i precyzji. Takie rozmieszczenie pozwala również na pracę w zamkniętych pomieszczeniach lub w warunkach wymagających ciągłych korekt, np. przy bocznym wietrze.
Skupiając się na przeznaczeniu pojazdu jako lekkiego środka transportu ładunków o masie do 5 kg, wybrane zostały elementy napędowe zapewniające równowagę między siłą ciągu a zużyciem energii. System składa się z wielu silników elektrycznych, rozmieszczonych w sposób zapewniający wielokierunkową sterowność i stabilne utrzymywanie się w powietrzu w warunkach słabego wiatru. Specjalnie zaprojektowane ramiona montażowe, wydrukowane w technologii 3D z lekkiego filamentu kompozytowego, zapewniają wsparcie dla silników. Układ napędowy musi być ściśle zintegrowany z architekturą sterowania statkiem powietrznym, umożliwiając przejście między trybem ręcznym a w pełni autonomicznym trybem lotu. Jednostki napędowe są zasilane akumulatorami litowo-jonowymi.
Podczas lotu należy aktywnie utrzymywać stabilność statku powietrznego, zwłaszcza w odpowiedzi na zmiany położenia, warunki wiatrowe i rozkład ładunku. Aby to osiągnąć, układ napędowy dynamicznie dostosowuje poziom ciągu na podstawie danych z czujników pokładowych – modułów pozycjonujących i danych inercyjnych. Koordynacją zajmuje się system operacyjny. Precyzyjne sterowanie siłą nośną i ruchem do przodu jest niezbędne do nawigacji podczas odbioru i dostawy ładunku.
Działanie systemu
Sterowiec SpaceCoffee działa w oparciu o zintegrowaną architekturę sterowania, która łączy dane zbierane z czujników, autonomiczne podejmowanie decyzji i zarządzanie siłownikami w czasie rzeczywistym. Sercem systemu jest mikrokontroler Raspberry Pi 5, który koordynuje logikę lotu, komunikację czujników i polecenia napędu. Oprogramowanie pokładowe zawiera moduły dostosowane do planowania trasy, omijania przeszkód, kontroli wysokości i procedur lądowania. Nawigacja opiera się na połączeniu modułu LIDAR, systemu pozycjonowania GPS i czujników zbliżeniowych, co pozwala sterowcowi dokładnie odczytywać swoją pozycję i dynamicznie reagować na otoczenie. Algorytmy sterowania są zaimplementowane z możliwością przełączania między trybem manualnym, półautonomicznym i w pełni autonomicznym, w zależności od wymagań misji lub interwencji operatora.
Wszystkie krytyczne dane telemetryczne są bezprzewodowo przesyłane do stacji bazowej w celu monitorowania w czasie rzeczywistym i analizy po zakończeniu misji. Aby zwiększyć bezpieczeństwo operacyjne, zastosowano redundantne protokoły komunikacyjne i podstawowy moduł zachowania awaryjnego, dzięki czemu statek powietrzny wykona lądowanie awaryjne w przypadku awarii systemu lub utraty zasilania. Protokoły operacyjne i sterowanie stanowią podstawę niezawodnego i powtarzalnego działania.
Nawigacja autonomiczna
System autonomiczny jest opracowywany w celu umożliwienia w pełni samodzielnego lotu, eliminując potrzebę ciągłego nadzoru ze strony człowieka. Podstawową innowacją przedstawioną w projekcie jest wykorzystanie modelu uczenia maszynowego, który został przeszkolony do sterowania nawigacją statku powietrznego i wykonywania podstawowych zadań. Proces szkolenia koncentruje się na osiągnięciu wysokiej wydajności przy użyciu minimalnego zestawu danych, co odzwierciedla rzeczywiste ograniczenia w gromadzeniu obszernych danych lotniczych.
Zamiast polegać wyłącznie na logice opartej na regułach, system został zaprojektowany tak, aby uczyć się i dostosowywać poprzez ekspozycję na wyselekcjonowane scenariusze lotów, co pozwala mu wykonywać zadania takie jak podążanie wyznaczoną trasą, omijanie przeszkód i transport lekkich ładunków. Szkolenie odbywa się na dedykowanej jednostce obliczeniowej skonfigurowanej do zadań związanych ze sztuczną inteligencją, a ostateczny model jest następnie uruchamiany jako część systemu na podkładzie sterowca.
Wstępne testy terenowe są planowane w sprzyjających warunkach pogodowych, aby zweryfikować zachowanie modelu w przyjaznym środowisku. Ostatecznym celem projektu jest wdrożenie adaptacyjnego, opartego na uczeniu się systemu autonomicznego. Podejście to otwiera drogę do dalszych opcji, np. uczenia się przez wzmocnienie w dynamicznych środowiskach.
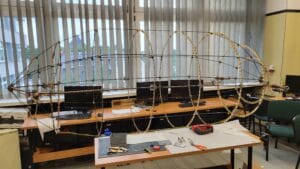
Jak powstawał sterowiec:








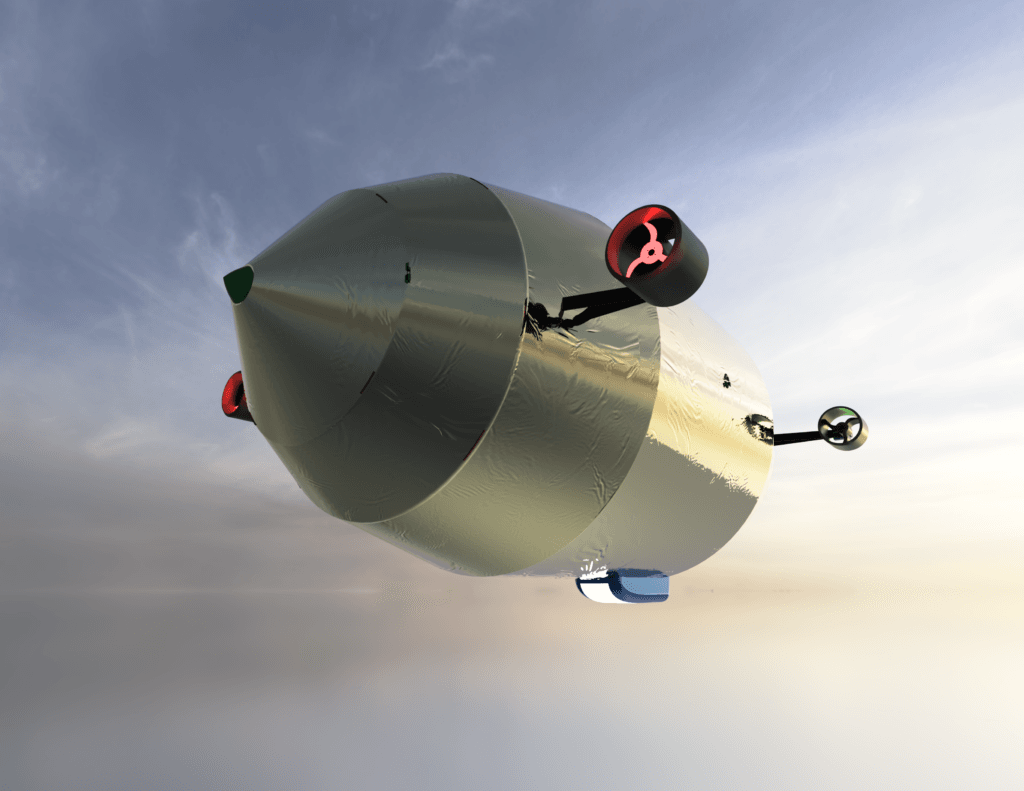
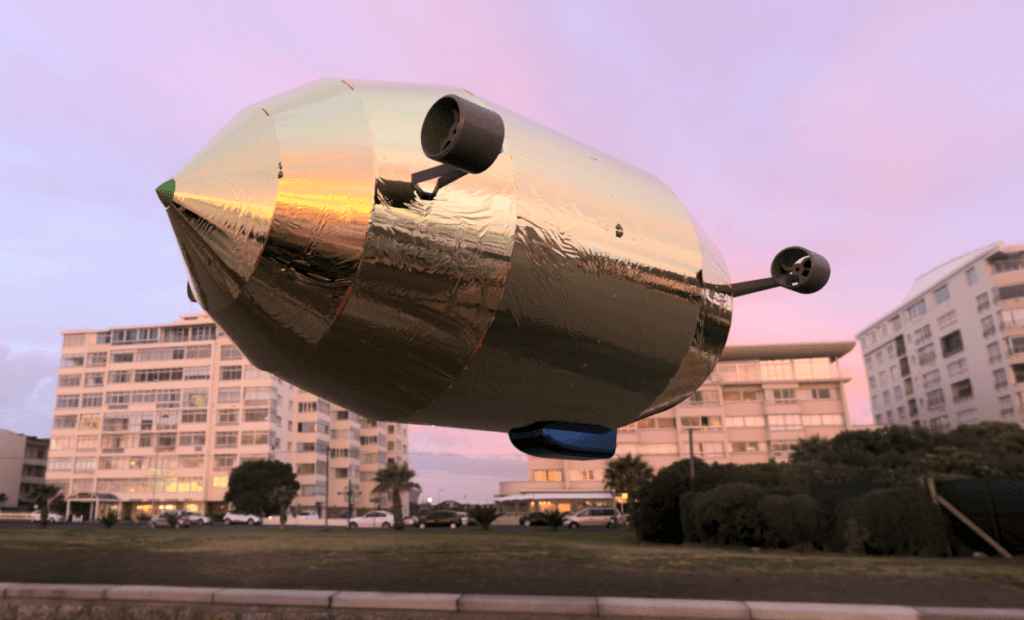
Widoki z pierwszego lotu testowego:





Przyszłość projektu
Sterowiec będzie dalej rozwijany, w postaci następnych iteracji projektu. Planowana jest zmiana konstrukcji z uzwględnieniem bardziej odpowiedniego wyważenia, w tym zmiana rozmiarów ramy. Dzięki dofinansowaniu na kolejne projekty, instensywnie rozwijana będzie autonomia systemu nawigacji.