Cel misji i funkcje mini-sondy
Jako główny cel misji CanSat, zespół projektowy obrał testowanie i mierzenie warunków panujących na obcych planetach—zainspirowani chęcią poznawanie nauki astronomii i eksploracją kosmiczną w kierunku rozszerzania zasięgów ludzkich na inne planety i tworzeniem na nich ośrodków badawczych.
Obejmuje to upewnienie się, że dana planeta jest bezpieczna do lądowania — zmierzone zostaną elementy jej warunków życia, takie jak temperatura, ciśnienie, pole elektromagnetyczne i wilgotność. Aby upewnić się, że nie tylko urządzeniom nic nie zagraża, ale także ludziom, mierzone zostaną także szczegółowe parametry, takie jak promieniowanie gamma, promieniowanie UV oraz natężenie światła, to ostatnie głównie w celu przewidywania wydajności paneli słonecznych. Dodatkowo zespół upewni się, że ich CanSat przetrwa upadek z określonej w wyzwaniu wysokości, na cele czego zainstalowany będzie akcelerometr, GPS i żyroskop.
Wszystkie zebrane dane o mierzonych parametrach powinny być zapisywane na zewnętrznym dysku pamięci, w tym przypadku karcie microSD, oraz przesyłane na bieżąco podczas spadania do stacji naziemnej za pomocą transmisji radiowej.
Design mini-sondy
Przegląd
Sonda zostanie zrzucona z rakiety wystrzelonej na wysokość około 2000 metrów, a jej prędkość opadania nie przekroczy 8 metrów na sekundę. Podczas opadania i po wylądowaniu nasza sonda będzie stale mierzyć wszystkie parametry wymienione powyżej.
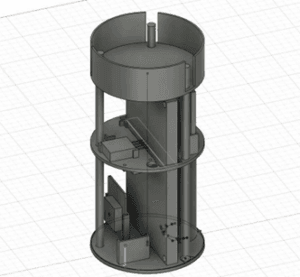
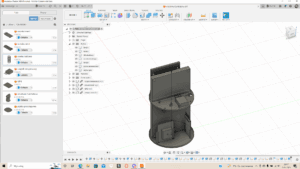
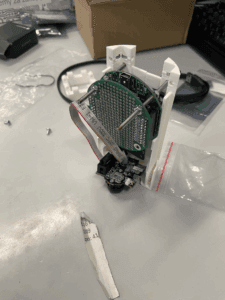
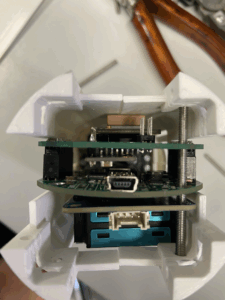
Konstrukcja mechaniczna
Wszystkie moduły i systemy, z których składać się będzie sonda, to:
- Moduł czujników: taki jak termometr (DHT11), wilgotnościomierz (DHT11), barometr (IMU 10DoF), magnetometr (IMU 10DoF), GPS (MTK3339), licznik Geigera (GC-1602-NANO) i spektrofotometr (AS7265x). Aby określić, czy obca planeta jest bezpiecznym obszarem do stworzenia kolonii, zmierzone zostanie promieniowanie gamma, promieniowanie UV i pole elektromagnetyczne. Dodatkowo zostanie sprawdzone natężenie światła, aby wskazać, czy panele słoneczne przyszłej kolonii będą skuteczne. Każdy inny pomiar misji dodatkowej zostanie wykorzystany do określenia aktualnej pozycji i statusu sondy, zgodnie z planowanym przebiegiem misji.
- Obudowa: wydrukowana w 3D przy użyciu filamentu typu PETG, o wadze nieco ponad 300 g. Otwierana część obudowy będzie prawdopodobnie umieszczona na spodzie CanSata, aby zapewnić łatwy dostęp do baterii i sprzętu. Aby spektrofotometr działał, wykonany zostanie okrągły otwór z jednej strony obudowy satelity. Na jego powierzchni zewnętrznej zainstalowane będą również lampki kontrolne LED i włącznik/wyłącznik. Większość modułów satelity zamontowane zostanie pionowo, najcięższe elementy, takie jak bateria, na spodzie obudowy.
- Główny kontroler: Arduino Nano RP2040 działa jako główny kontroler i płyta główna naszego satelity. Zawiera on mikrokontroler Raspberry Pi RP2040. Każdy moduł używany w misji podstawowej i dodatkowej będzie do niego podłączony, a kontroler będzie odpowiedzialny za transmisję danych między mini-satelitą a stacją naziemną, również za pośrednictwem modułu radiowego.
- Moduł zapisu danych: czytnik kart microSD zostanie zainstalowany na zewnętrznej powierzchni obudowy.
- System komunikacji (moduł radiowy): jednokierunkowy (tylko z CanSata do stacji naziemnej), o częstotliwości radiowej 433 MHz. Użyty będzie moduł LoRa-02 jako nadajnik-odbiornik, ze zwykłą anteną miedzianą 33×4,9 mm w satelicie i anteną COMA ATK-10 podłączoną do stacji naziemnej.
- Moduł zasilania: zasilanie przebiegnie dzięki akumulatorowi litowo-jonowemu o pojemności 3350 mAh. Według odczytów zużycia energii podczas pracy każdego modułu, satelita CanSat powinien działać przez około 7,5 godziny, przy średnim zużyciu — około 10 godzin.
- System odzyskiwania z modułem GPS: spadochron jest częścią główną systemu odzyskiwania CanSata. Głównym celem jego wykorzystania jest spowolnienie opadania CanSata do 8 m/s. Spadochron będzie miał kształt kopuły i będzie wykonany z nylonu, z użyciem jaskrawoczerwonych materiałów, w celu późniejszej lokalizacji sondy CanSat w miejscu lądowania na ziemi. W procesie lokalizacji potrzebny jest GPS, z ktrego sygnał będzie wysyłany w sposób ciągły do momentu odnalezienia i wyłączenia satelity.
Projekt oprogramowania
Zadaniem oprogramowania dla mini-sondy będzie obliczanie odpowiednich wartości przy użyciu danych pomiarowych uzyskanych z głównego i dodatkowego modułu misji i wysyłanie ich do stacji naziemnej. Powinno ono zarządzać systemem komunikacyjnym tak, aby priorytetowo wysyłać najważniejsze informacje, takie jak lokalizacja i prędkość. Drugą istotną funkcją programu sterującego satelitą będzie zapisywanie mierzonych danych bezpośrednio na dysku zewnętrznym podczas procesu pomiarowego. Większość zebranych danych zostanie przesłana w systemie bieżącym do stacji naziemnej, ale aby nic z nich nie zostało utracone, kopia każdego wyniku pomiaru będzie przechowywana.
Opisane oprogramowanie zostanie napisane w Arduino C, w środowisku programistycznym Arduino IDE.
Stacja kontroli naziemnej
Stacja naziemna będzie składać się z jednego komputera podłączonego do modułu zarządzania radiowego, który przechwytywać ma dane odbierane z mini-satelity. Oprogramowanie stacji naziemnej wyświetli każdy otrzymany wynik pomiaru w aplikacji w postaci odpowiadających wykresów. Model CanSat 3D wskaże wszystkie informacje o pozycji satelity i jego statusie. W ten sam sposób dane będą wyświetlane w ogólnodostępnej aplikacji mobilnej. Dane wykorzystywane przez aplikację mobilną będą dostarczane za pośrednictwem internetowego serwera FTP przez komputer stacji naziemnej. Oprogramowanie stacji naziemnej zostanie napisane głównie w języku programowania C#, z wyjątkiem modułu zarządzania radiem napisanego w Arduino C.
Galeria: design i rendery