Cel misji i funkcje mini-satelity
Wyznaczono dwie misje do wykonania przez mini-satelitę. W podstawowej misji, jednym z naszych celów jest pomiar temperatury otoczenia. Dane z termometru będą przekazywane do aplikacji mobilnej za pośrednictwem serwerów FTP podłączonych do naszego komputera naziemnego, nadawane sygnałem radiowym. Drugim parametrem, który będzie mierzony w ramach misji podstawowej, jest ciśnienie, które będzie sprawdzane za pomocą barometru, a wyniki będą przesyłane, podobnie jak w przypadku termometru, do aplikacji.
Misja drugorzędna polega na lądowaniu i wykonaniu zdjęć otoczenia. Zakłada także mierzenie takich parametrów jak: prędkość, pozycja w przestrzeni, wysokość nad powierzchnią planety, przyspieszenie i pole elektromagnetyczne.
Całość naszej misji ma służyć jako symulacja lądowania na obcej planecie. Możliwe jest wykorzystanie zebranych pomiarów i zdjęć w celu znalezienia najlepszego miejsca na niezbadanej planecie z gęstą atmosferą (szczegółów powierzchni planet o gęstej atmosferze nie widać na zdjęciach satelitarnych), w którym mógłby wylądować łazik. Możliwe jest utworzenie floty satelitów CanSat, których zaletą jest niedrogi koszt produkcji. Takie wykorzystanie pozwoli, na podstawie realnych i dokładniejszych danych, wybrać najlepszy obszar do lądowania dla pojazdów eksploracyjnych. Misja CanSat zakończy się sukcesem, jeśli mini-satelita wyląduje, wykona zdjęcia i pomiary: pola elektromagnetycznego, położenia, ciśnienia, temperatury, a dane zostaną pomyślnie przesłane do aplikacji.
Design mini-satelity
Przegląd
Nasz CanSat zostanie zaprojektowany i zbudowany tak, aby wynieść go w rakiecie na wysokość około 2000 metrów oraz stamtąd wykonać zrzut, rozpoczynając działanie sondy. Opadanie satelity z rozwiniętym pod wyrzucie spadochronem ma być nie szybsze niż 9 metrów na sekundę, podczas gdy po osiągnięciu wysokości 50 metrów nad ziemią zwolni do 2 metrów na sekundę, co ma zapewnić drugi spadochron.
W tym czasie sonda będzie mierzyć temperaturę, ciśnienie, prędkość, położenie, wysokość, przyspieszenie, pole elektromagnetyczne, przesyłając je do aplikacji. W tym czasie wykonywane będą również zdjęcia okolicznych miejsc za pomocą kamery.
Projekt mechaniczny i strukturalny
CanSat SpaceCoffee będzie używał tylko jednego silnika elektrycznego do rozłożenia drugiego spadochronu i otwarcia nóg przed lądowaniem. Silnik będzie dostarczał moc do mechanizmu różnicowego, który rozłoży nóżki. W tym samym czasie silnik zwolni linki, które utrzymują drugi spadochron.
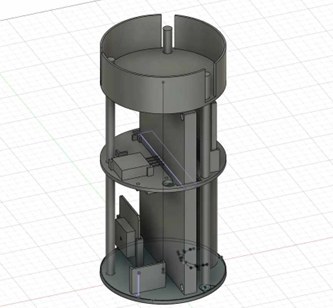
Całość naszego CanSata będzie wykonana z twardego filamentu. Będzie również posiadać wypustki, które pozwolą nam połączyć ją z zewnętrznymi komponentami. Nogi do lądowania są zasadniczo skonstruowane jako ściany, które otworzą się 50 metrów nad ziemią za pomocą wyżej opisanego mechanizmu. Same nóżki będą wykonane z elastycznego filamentu, otwierając się w celu ustabilizowania sondy CanSat, co dodatkowo pomoże w jej spowolnieniu. Na poniższym zdjęciu można zobaczyć 4 widoki naszego CanSata z rozłożonymi i złożonymi nogami.

Najcięższe elementy zostaną umieszczone na spodzie obudowy CanSat. Wszystkie komponenty i struktura mini-sondy będą ważyć od 300 do 350 gramów. Wysokość CanSata wraz ze spadochronem wyniesie około 15,5 centymetra, a średnica około 6,4 centymetra. Spadochron będzie połączony z sondą w najwyższej części konstrukcji.
W naszym CanSacie zostaną użyte dwa spadochrony, z których każdy będzie miał kształt kopuły. Pole pierwszego z nich wynosi 433 cm2 i otworzy się natychmiast, aby spowolnić mini-satelitę do 9 metrów na sekundę. Pole drugiej wynosi 9331 cm2 i ma się otworzyć 50 metrów nad ziemią, spowalniając CanSata do prędkości 2 metrów na sekundę. Oba pola wykonane są z folii polipropylenowej, która jest lekka i cienka, ale bardzo wytrzymała. Poszczególne arkusze folii zostaną zszyte nićmi na maszynie do szycia, a następnie konstrukcja zostanie wzmocniona taśmą samoprzylepną.
Projekt elektroniki
Planujemy zaimplementować elementy elektroniczne: silnik, kamerę, radio i czujniki środowiskowe. Silnik elektryczny zostanie zainstalowany, aby zapewnić możliwość obracania ścian i wysuwania z nich nóg, a silnik będzie również używany do odłączania drugiego spadochronu. Kamera będzie używana do robienia zdjęć, które zostaną zapisane w pamięci pokładowej lub alternatywnie, gdy będzie to możliwe, przesyłane z wykorzystaniem sygnału radiowego. Poza tym, sygnały radiowe będą służyły wysyłaniu danych do komputera, aby zapewnić możliwość wyświetlania zebranych przez czujniki pomiarów w naszej aplikacji.
Podsystemy elektroniczne
● Zasilanie: akumulatory litowo-jonowe o napięciu 3,6 V i szacowanym czasie pracy 6 godzin.
● System komunikacji: transmisja danych będzie prowadzona za pośrednictwem częstotliwości radiowej 433 MHz, dzięki czemu CanSat będzie mógł wysyłać informacje do stacji naziemnej w regularnych odstępach czasu. Stacja naziemna będzie również w stanie kontrolować działanie sondy w przypadku jakichkolwiek problemów. Dla stacji naziemnej użyjemy anteny CDMA ATK-10.
● System odzyskiwania: po wylądowaniu naszego CanSata, moduł GPS będzie stale wysyłał informacje do stacji naziemnej, które pokażą nam lokalizację mini-sondy. Po odzyskaniu sondy, możliwe będzie pobranie karty SD z płyty głównej w celu przejęcia danych.
Projekt oprogramowania
Oprogramowanie naszego CanSata będzie obsługiwać dane z zaimplementowanych czujników i przesyłać je za pomocą sygnałów radiowych do stacji naziemnej. Z tej stacji, dane będą przesyłane na serwery FTP. Wszystkie zebrane parametry będą dostępne w naszej aplikacji mobilnej, połączonej z serwerami. Niektóre informacje, których nie można przesłać za pomocą sygnału radiowego, będą przechowywane w pamięci pokładowej.
Podczas tworzenia oprogramowania będziemy używać języka Arduino C w środowisku programistycznym Arduino IDE.
Galeria: projekt i rendery
TBA