Introduction
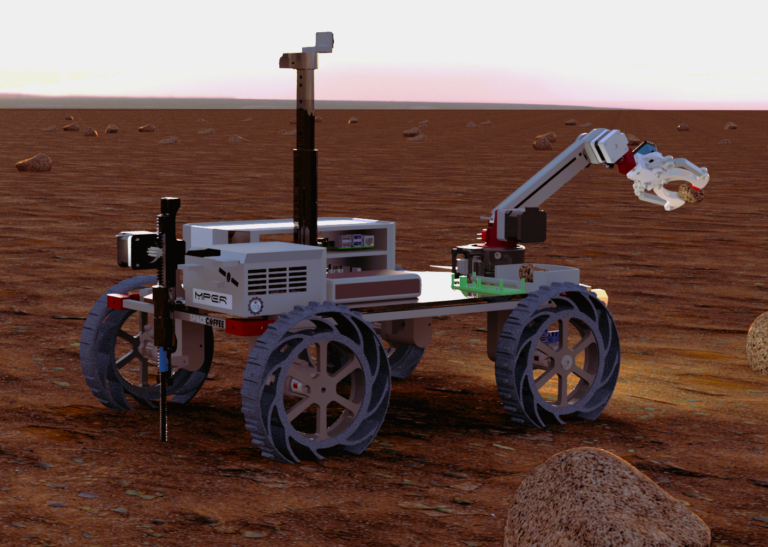
MPER, czyli Multi-Purpose Exploration Rover, to dotychczas najdłużej trwający projekt inżynieryjny i programistyczny SKN SpaceCoffee, rozpoczęty w 2023 roku. Jest to również pierwszy oryginaln i pełnoprawny projekt, nad którym nasze Koło rozpoczęło prace. Zapraszamy do zapoznania się ze szczegółowymi informacjami na temat łazika opracowanego przez SpaceCoffee.
Robotyczni posłańcy
Od momentu gdy pojawiliśmy się na tym świecie, ludzie starają się jak najlepiej poznać go i rządzące nim zasady. Jeszcze wczoraj odkrywaliśmy nowe wyspy i kontynenty, a dziś zrobotyzowani posłańcy odwiedzają obce planety i księżyce. Te bezzałogowe, autonomiczne pojazdy—łaziki—zostały zaprojektowane do eksploracji obcych ciał niebieskich i trudno dostępnych terenów. Ich główną misją jest badanie tych miejsc: zbieranie okazów, gromadzenie bezcennych danych o panujących tam warunkach. Badania te są znaczącym krokiem ku rozszerzaniu naszej wiedzy o przestrzeni kosmicznej i planetach, a także w badaniu możliwości kolonizacji kosmosu i tworzenia naukowych baz kosmicznych. Tak liczne wieści o wielu trwających i planowanych misjach z udziałem łazików zainspirowały nas do zbudowania własnego.
Cele i założenia projektu
Zaplanowany zestaw funkcji łazika
- Zdalne sterowanie zadaniami i półautonomiczne nawigowanie za pomocą interfejsu użytkownika stworzonego podczas projektu, komunikacja za pośrednictwem Wi-Fi 2,4 GHz/5 GHz.
- Możliwość precyzyjnej manipulacji, która będzie możliwa dzięki opracowanemu ramieniu robotycznemu z modułem manipulatora.
- Pobieranie próbek z i spod powierzchni dzięki w pełni rozwiniętemu, efektywnemu modułowi wiercenia i przechowywania; możliwość przechowania do 5 próbek.
- Realizacja celów badawczych—możliwa dzięki wdrożeniu czujników środowiskowych do badania składu gleby, atmosfery i wykrywania promieniowania, wraz z systemem ważenia pobranych próbek.
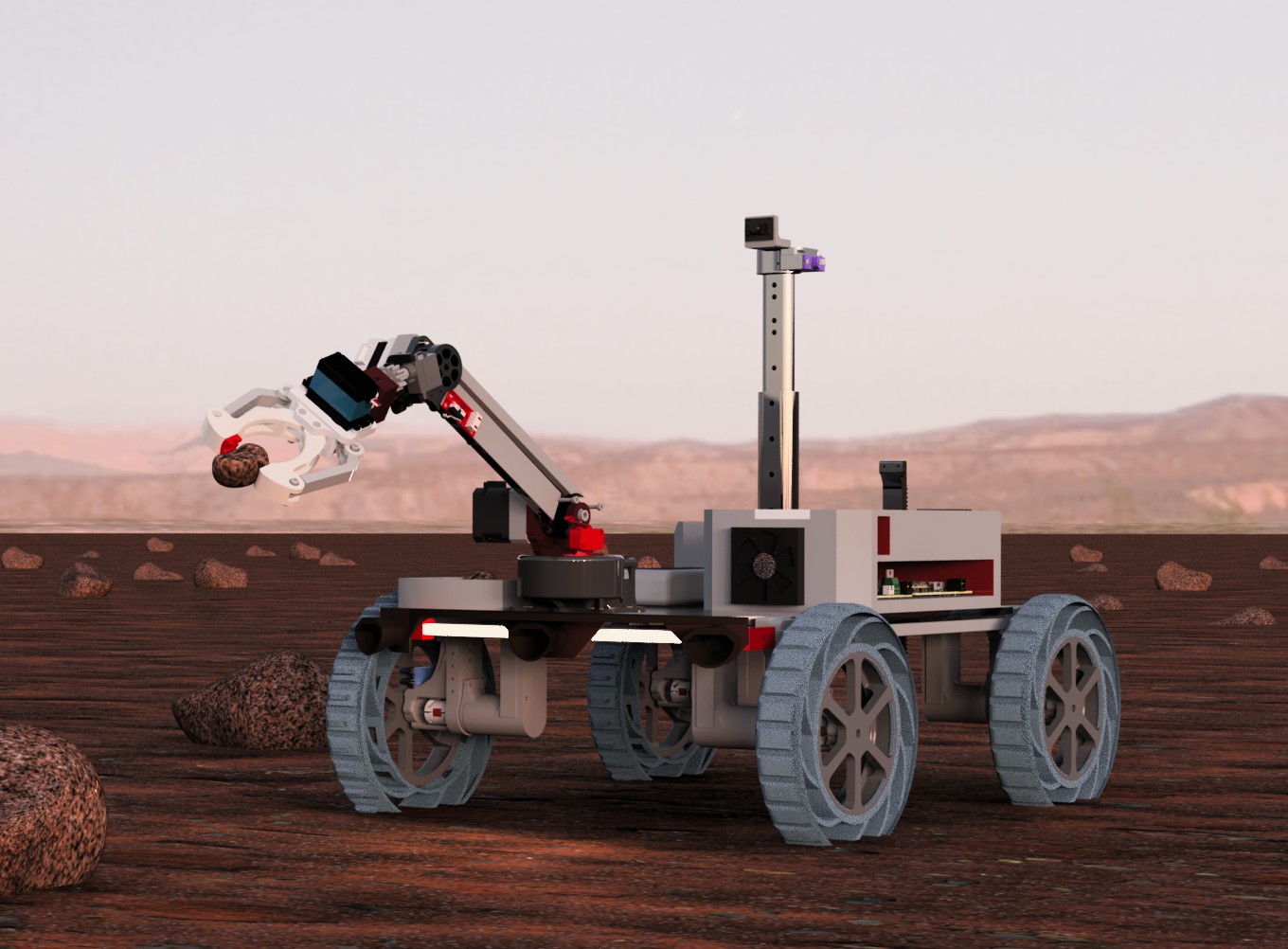
- Łazik jest wyposażony w trzy kamery: szerokokątną, noktowizyjną o średnim kącie widzenia i do rozpoznawania obiektów przy użyciu AI. Kamera szerokokątna może obracać się w osi pionowej lub poziomej za pomocą serwomotoru.
- Jazda po wzniesieniu o nachyleniu do 30 stopni.
- Zbudowany spersonalizowanie system LIDAR, który stanowi podstawę do autonomicznej nawigacji łazika.
- Zaimplementowany ma zostać algorytm planowania ścieżki, pozwalający łazikowi na autonomiczne poruszanie się po terenie z wykorzystaniem GNSS, znaczników wizualnych i czujników przeszkód.
- Wykorzystanie czujników poboru prądu, gromadzących dane diagnostyczne modułów łazika.
Projekt łazika zakładał opracowanie taniego w budowie i łatwego do powielenia rozwiązania konstrukcyjnego, co skłoniło nas do zaproponowania wymiarów: masa poniżej 18 kg i wymiary platformy 700x450x300 mm. Prostota naszego łazika pozwala na równoległą obsługę i kontrolę wielu mniejszych pojazdów tego typu, co zmniejsza ryzyko awarii pojedynczego robota, od którego zależy powodzenie całej misji, podczas bardziej złożonych zadań operacyjnych. Do tego, rozległy teren może być eksplorowany przez wiele mniejszych łazików. Koncepcja misji, o której myśleliśmy, obejmuje główny niemobilny lądownik—laboratorium naukowe, z flotą dziesiątek łazików i dronów różnych rozmiarów i funkcjonalności, przygotowujących i dostarczających tam próbki.
Moduły i ich implementacja
Podczas projektowania naszego pojazdu pod uwagę wzięto wszystkie elementy niezbędne do jego działania. Z tego powodu, komponenty zostały podzielone na następujące moduły i odpowiadające im systemy:
- Platforma jezdna—podwozie: skonstruowany napęd ma zapewnić dostosowanie łazika do nierównych i wymagających powierzchni planetarnych, dzięki napędowi na 4 koła z systemem pochłaniania wstrząsów, który zapewnia mu dodatkową zwinność ruchu w trudno dostępnych lub trudnych do nawigowania miejscach.
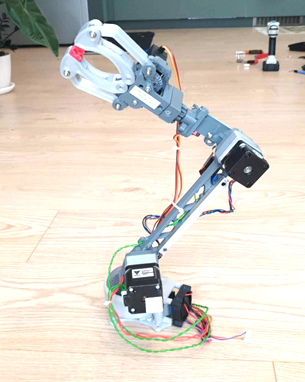
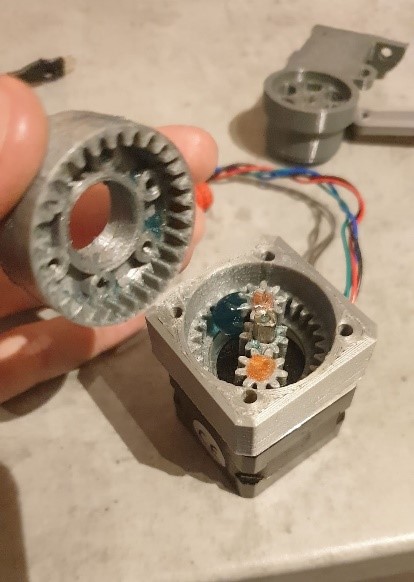
- Robotyczne ramię i manipulator z chwytakiem: komponent musi umożliwiać precyzyjną interakcję z otoczeniem; ramię manipulatora ma 4 stopnie swobody i pięć przegubów, w którym zastosowaliśmy zaprojektowaną kombinację 2 typów przekładni – przekładni stepped-planetary, w całości wydrukowanej z PETG. To zapewnia nam łatwość eksperymentowania z parametrami ramienia, dzięki czemu możemy określić najlepszy projekt jego konstrukcji. Łazik może zbierać materiały z otaczających go powierzchni i przenosić je na swoją platformę, która jest wyposażona w wagę do wstępnego określenia parametrów próbki.
- Całe ramię jest lekkie, ma 4DOF i wykorzystuje 3 silniki krokowe i 2 serwomechanizmy do precyzyjnej nawigacji ruchu. Jego maksymalny udźwig planowany jest na 1 kg.
- System przechowywania próbek: opracowaliśmy inteligentny system pojemników—pojedynczy czujnik siły dla przedniej komory i drugi pojedynczy czujnik z tyłu dla próbek z głębokich odwiertów. Czynność umieszczenia próbki jest rejestrowana, a waga obliczana na podstawie różnicy w całkowitej wadze modułu, z dokładnością +/- 0,5 g, przy użyciu pojedynczego czujnika wagowego. Pozwala to na przechowywanie wielu próbek bez użycia większej liczby czujników wagowych. Magazyn dla próbek z głębokich odwiertów cechuje się obrotowym systemem wymiany pojemników i ma również opcję sekwencyjnego ich opróżniania, przy użyciu pojedynczego serwomechanizmu do obracania przedziału. Przedni przedział ładunkowy nadaje się do przechowywania skał lub innych przedmiotów zebranych przez łazik, a także do składowania podstawowych narzędzi, które mogą być używane przez manipulator. Zawarty tam jest też czujnik promieniowania jonizującego, jako część modułu czujników środowiskowych (do badania atmosfery) oraz czujnik masy.
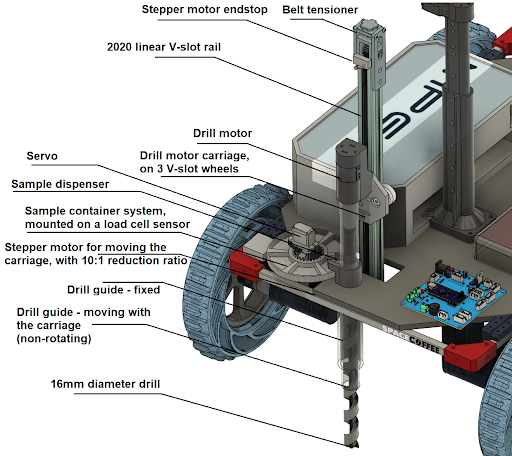
- System odwiertu: moduł odpowiedzialny za pobieranie próbek gleby. Obecna głębokość planowana dla zanurzenia wiertła wynosi do 20 cm pod powierzchnią. Najnowsza konstrukcja systemu obejmuje silnik krokowy przesuwający wózek po prowadnicy „V-slot”, z ogranicznikiem na górze. Moment obrotowy silnika krokowego jest zwiększany za pomocą naszej niestandardowej przekładni.
- Prowadnica jest podzielona na dwie części – stałą i ruchomą. Część stała zapewnia oparcie mechaniczne i działa jak łożysko liniowe, podczas gdy część ruchoma jest przymocowana do wózka i ściśle przylega do wiertła, umożliwiając próbkom gleby przemieszczanie się w górę, jak pokazano na schematach systemu odwiertu.
- System pobierania próbek: składa się z dwóch innych modułów: manipulatora i systemu odwiertu. Przedni przedział ładunkowy znajduje się w zasięgu ramienia robota. Po pobraniu, próbki mogą być transportowane i przechowywane w przygotowanych pojemnikach korzystając z manipulatora. Wymaga to uwzględnienia ich szczególnej kruchości i zapewnienia wcześniejszej sterylizacji pojemnika. Wiertło obraca się wzdłuż prowadnicy, umożliwiając przeniesienie próbki do góry w kierunku systemu przechowywania próbek.
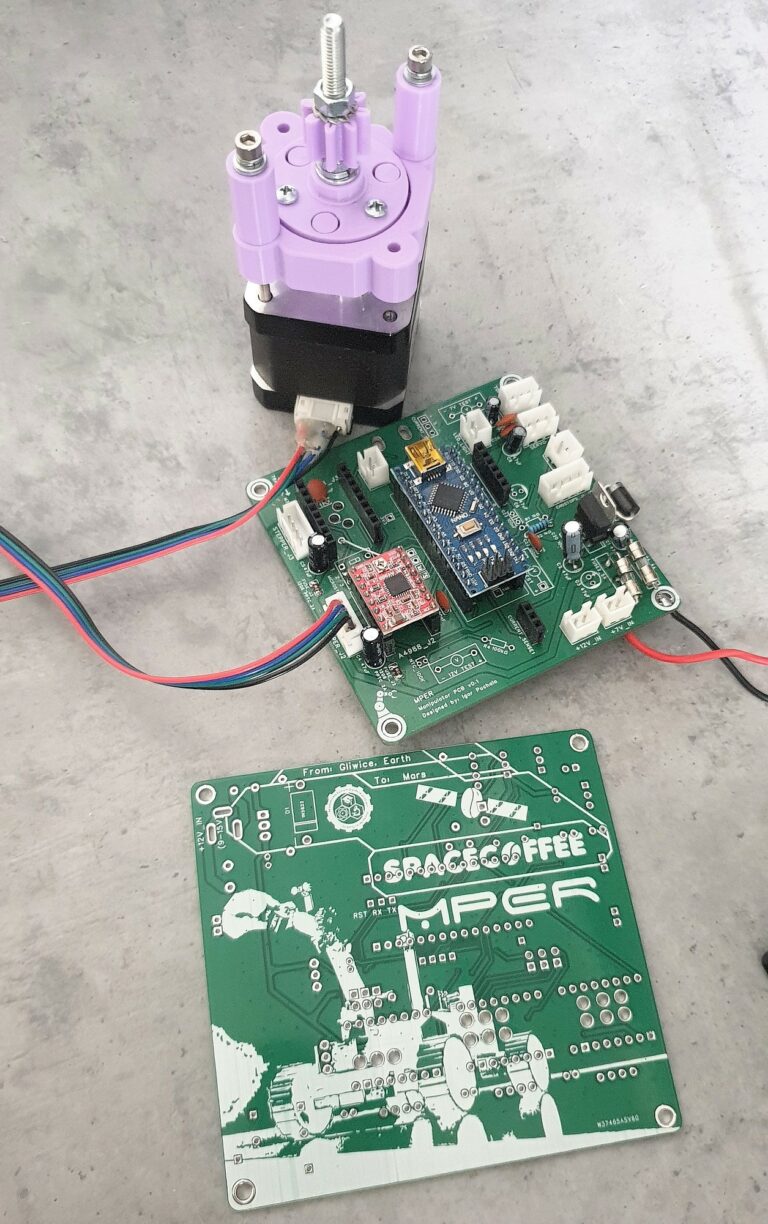
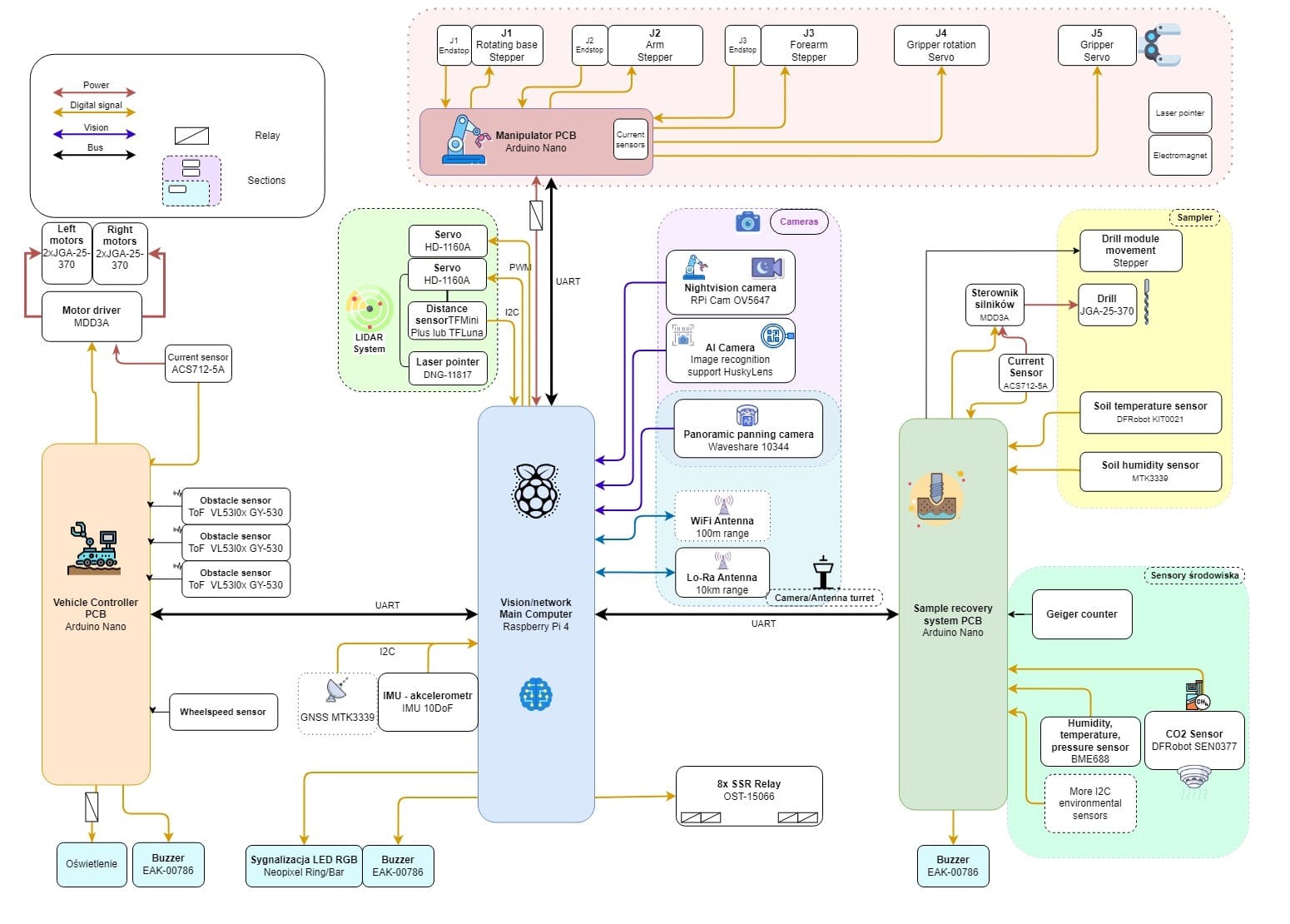
- Main Computer and Subsystems Computers: responsible for coordinating the entire rover. Transfer of information and commands between the subsystems takes place over SPI buses connected to the rover's main computer. We have developed 3 distinct PCB’s for the main subsystems: Chassis, Manipulator and Sampler, all three driven by an independent microcontroller (Arduino Nano), receiving and sending data to the main controller (Raspberry Pi 5).
- Envorinmental Sensors Module: used for the research of environmental conditions prevailing on planets other than Earth were the collection of sensors meant for separate examinations of the atmosphere and the soil. For the aim of analyzing the atmospheric factors, we completed an Arduino Nano-based system of pressure, temperature, humidity and CO2 sensors.
- Additionally, our rover is equipped with an ionizing radiation sensor, placed next to the front cargo compartment. It can be used to measure background radiation and solar storms, and also detect radioactivity of objects picked up by the rover.
- The examination of factors related to soil conditions will be possible due to use of humidity and temperature probes.
- The listed above factors are needed for assessing the elements of a planet’s nature, evaluating its habitability and, for example, crop harvest ability. Measurements prepared during the study of the sample are transmitted from the sensory modules through an UART bus to the Raspberry Pi 5-based main computer. The noted values are then sent to the ground base for the conduct of further research. An important addition in the works is a UV radiation sensor.
- Intuitive UI: Full control of the rover can be achieved in browser, with live telemetry and view. We are developing a pathing system where the operator can tap on a point in view of the rover, and the rover will drive there, avoiding obstacles along the way. The user interface can be accessed by browser on any PC or mobile device, allowing intuitive control of the vehicle.
- Custom-built LIDAR-like system – consisting of a two DOF laser sensor “turret”, which can point at any object and return its distance from the rover.

Developments: posts related to the MPER project
Sample collection and containment system for a compact planetary exploration rover
Tytuł: Sample collection and containment system for a compact planetary exploration rover Autorzy: Maja Rudnicka, Michał Lasak, Igor Puchała, Piotr Bartosz, Dominik Bereta, Dariusz Myszor Konferencja: International Students Scientific Conference TalentDetector2024_Summer Abstrakt: The purpose of this research is to develop an exploration rover to use in Earth and Martian-like environments, which requires the development of…
Rozwój projektu MPER (2023)
Uzyskane ulepszenia Podczas tegorocznych prac nad łazikiem wdrożyliśmy imponującą liczbę zaplanowanych funkcji i komponentów. Nasze prace koncentrowały się na: — Zakończeniu projektowania zintegrowanego układu na płytce PCB. — Modernizacji podwozia naszego łazika, w oparciu o wnioski wyciągnięte z testów poprzedniego modułu. Obecnie używane podwozie jest przeznaczone do budowy pełnowymiarowej konstrukcji. — Projektowaniu, produkcji elementów, instalacji…
MPER na Konferencji „Projekt Politechnika”
Zespół rozwoju łazika z naszego Koła zaprezentował MPER na konferencji projektów licealnych PBL, organizowanej przez Politechnikę Śląską. Zademonstrowali zarówno aktualny model łazika, jak i poster podsumowujący ich pracę nad projektem. Poster przygotowany na Konferencję MPER podczas prezentacji na Konferencji „Projekt Politechnika”
Future potential developments
The main two solutions viewed as future extensions of the rover are: current consumption diagnostics, for which we plan to utilize 5 current consumption sensors—their use includes measuring forces of the manipulator's gripper and joints, as well as sample drill movement. It also allows for drivetrain diagnostics and estimation of time left until the battery is discharged. The second extension is the use of solar panels as part of the Power Supply Module. A design of a collapsible solar array, for preserving the rover's mobility and stability when not charging, is possible.